Na začátku roku 2022 padlo rozhodnutí postavit robota pro venkovní soutěže. Venkovních soutěží se sice účastníme už několik roků, ale zatím jen s roboty z Lega nebo Merkuru. Chtěli jsme postavit něco „robustnějšího“. V plánu je jezdit na venkovní soutěže na které už jezdíme, tedy Robote rovně v Písku a dvakrát v Olomouci – Tulák po parku a Olomoucká hřebenovka.
Jak to celé vzniklo
Volba padla na elektrický invalidní vozík. Začal hon na inzeráty, bylo jasné, že musíme pořídit něco „jetého“. Důležité byly dva nezávislé motory a nafukovací pneumatiky.
Před letními prázdninami se na nás usmálo štěstí a koupili jsme jen podvozek, bohužel, ale bez jakékoli elektroniky a popisu. Jedná je o torzo invalidního vozíku Invacare STORM XC, stav po zakoupení je vidět na fotografiích.








Konstrukce je jevila ideální. Zadní, hnaná kola mají rozměr 3.00×8” a přední vlečená 3.00×4”. Motory jsou stejnosměrné 24V/250W s brzdou, která jde odbrzdit elektricky nebo trvale mechanicky. Další, bubnová brzda, ovládaná bovdenem, je přímo na kolech.
První soutěž na kterou jsme se začali připravovat byla Olomoucká hřebenovka. První úkol byl jasný, podvozek rozpohybovat. Padlo rozhodnutí jezdit opačně, tedy tak, jak jsme zvyklí, s hnanými předními koly.
Další dilema bylo napájecí napětí, použít původních 24V nebo bude stačit jen poloviční?
Vyzkoušely jsme autobaterii a výsledek byl velmi uspokojivý. Motory se točily rychlostí, kterou budeme schopni uregulovat a měly sílu. Naprázdno odebíraly cca 4,5A.
Nastal čas pro regulaci otáček. Koupili jsme levný PWM Mosfet regulátor a pohořeli jsme, doslova. Regulátor má „papírové“ parametry 15A/400W, ale smrad a dým se objevil už po několika sekundách. Pořídili jsme tedy výkonnější a sofistikovanější H-můstek BTS7960B a ten už fungoval skvěle.
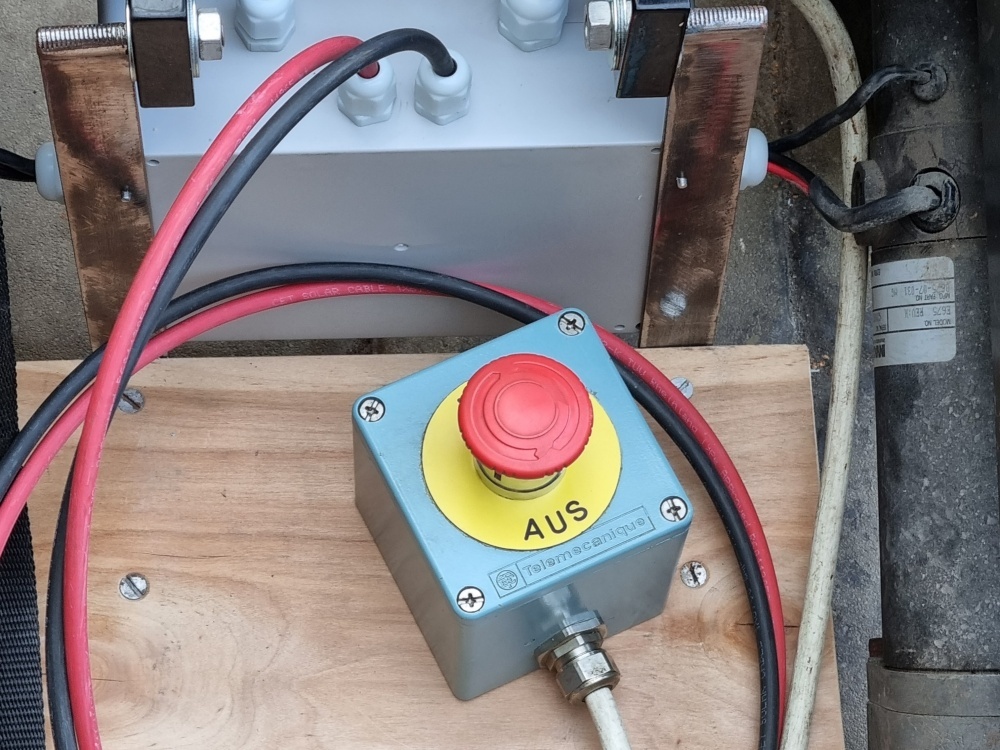
Nastal čas pro zabudování výkonové části pro ovládání motorů. Protože robot byl od začátku těžký a rychlý hned dostal stop tlačítko, to nevypíná baterii, ale jen výkonové napájení motorů.

Tak, už točíme. Co dál? No přece autonomní řízení. Počítali jsme se dvěma způsoby, jak robota řídit. Podle ultrazvuků jezdit podél zdi a nebo pomocí „tykadel“ mezi zdmi. První pokus s ultrazvukem byl poměrně uspokojivý.
Proběhlo další ladění a ladění programu i konstrukce a další zkoušky na delší trati. Výsledek byl super, posuďte sami.
Výsledek nás natolik nadchnul, že jsme vyrazili na zkoušku na „ostrou“ trať do Olomouce na Floru. Tam výsledky občas drhly. No zábradlí přece jen není zeď.
No a jak to dopadlo? Olomouckou hřebenovku 2022 jsme ve své kategorii vyhráli. Nebyli jsme ale jediní, naše výprava vyhrála i další dvě kategorie. Článek za soutěže je zde.
Popis konstrukce
Hardware
- podvozek z invalidního vozíku
- mechanická úprava z Al profilu pro uchycení komponent
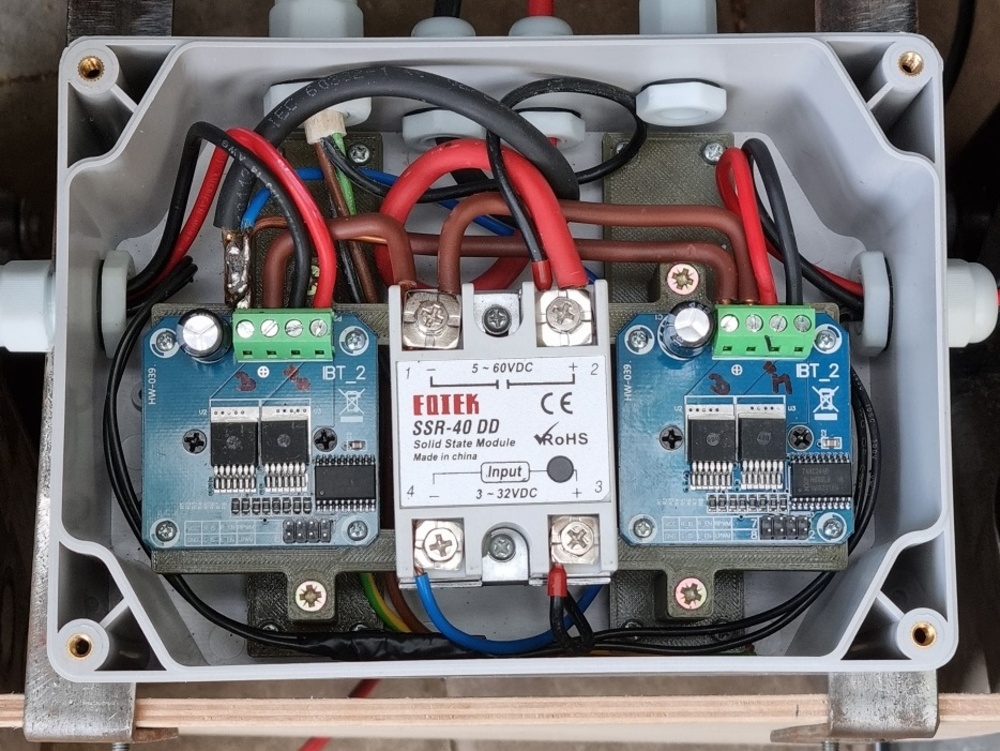
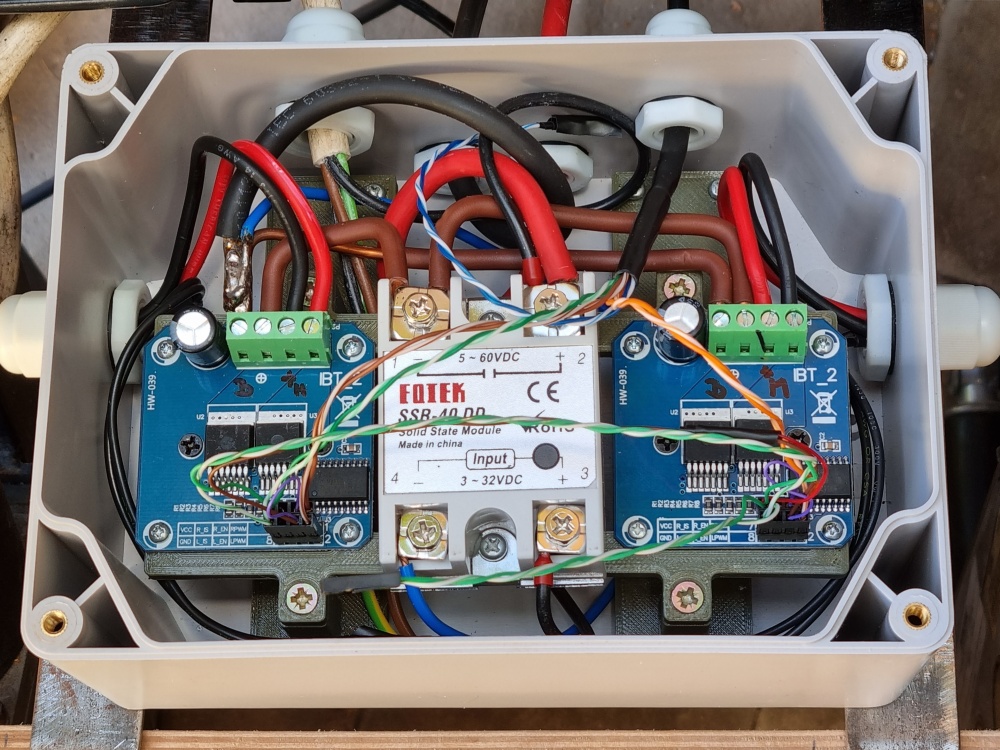
- el. krabice pro výkonové prvky
- el. krabice pro řídicí prvky
- napájení 12 V z autobaterie
- step-down měnič 5 V pro Arduino a čidla
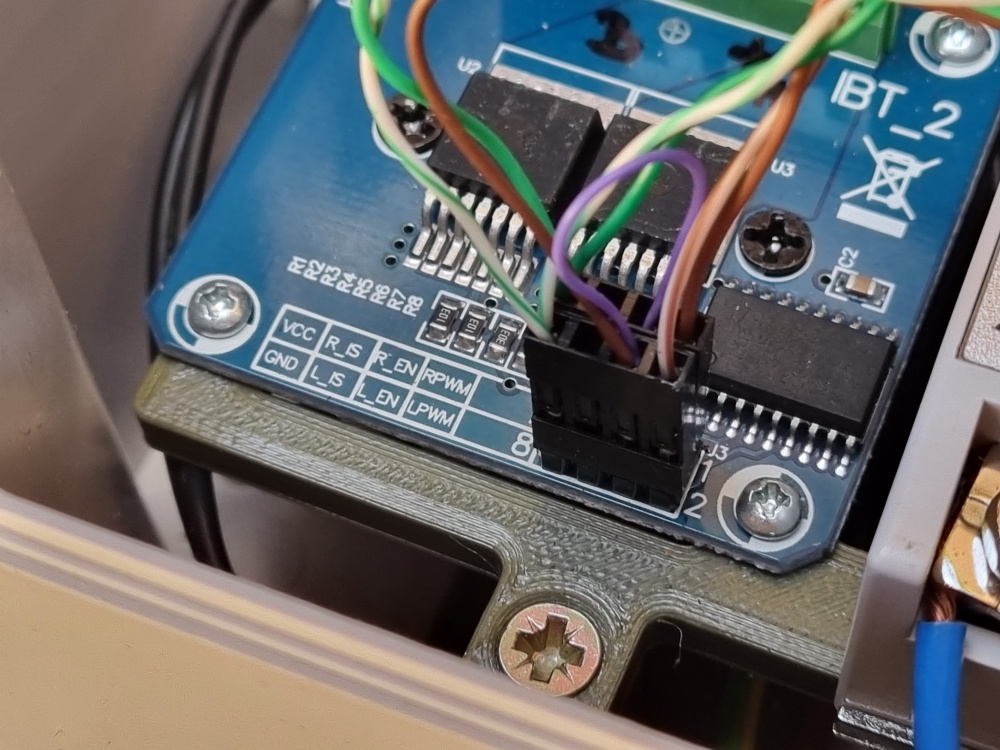
- 2x H-můstek (BTS7960B) 43A pro ovládání motorů
- relé pro odpojení motorů (SSR-40DD)
- 4 x koncový spínač (start, stop, tykadla, hrazda)
- 3 x ultrazvukový měřič vzdálenosti (HY-SRF05)
- svorkovnice
- Arduino Mega
Co dál?
Účastnit se dalších plánovaných soutěží. Dalším nemalým úkolem je doplnit mechaniku i software o odměřování polohy motorů. Určitě přijdou na řadu další čidla, plánujeme vyzkoušet GPS, kompas, lidar, …. Nápadů je spousta, ale času na „hraní“ už méně.